Pokročilé nastavení RC vrtulníku Blade Fusion 360
Home page » Blog » Pokročilé nastavení RC vrtulníku Blade Fusion 360
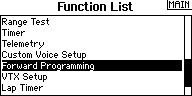
RC vrtulník Blade Fusion 360 umožňuje velmi snadnou úpravu parametrů stabilizace přímo pomocí vysílače Spektrum 2. generace. Upravami můžete vyladit chování vrtulníku podle Vašich požadavků. Parametry se nastavjí v menu Forward Programming, které je k dispozici ve funkčním menu vysílače.

Forward Programming je aktuálně k dispozici u RC vysílačů Spektrum: DX6 G2/G3, Spektrum DX7 G2, DX8 G2, DX9, DX10t, DX18 (všechny verze), DX20 a IX12.
| Menu | Popis |
|---|---|
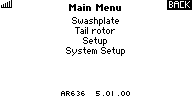 | Main Menu
|
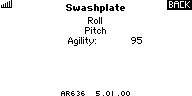 | Main Menu/Swashplate
|
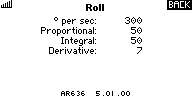 | Main Menu/Swashplate/Roll
|
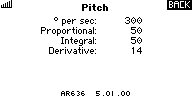 | Main Menu/Swashplate/Pitch
|
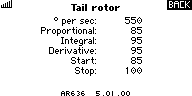 | Main Menu/Tail rotor
|
 | Main Menu/Setup
|
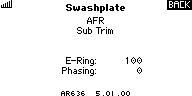 | Main Menu/Setup/Swashplate
|
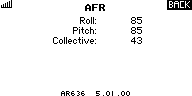 | Main Menu/Setup/Swashplate/AFR
|
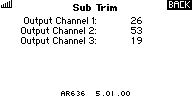 | Main Menu/Setup/Swashplate/Sub Trim
|
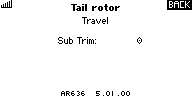 | Main Menu/Setup/Tail rotor
|
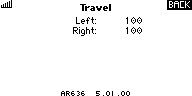 | Main Menu/Setup/Tail rotor/Travel
|
 | Main Menu/System Setup/Calibrate Sensor
|
 | Main Menu/System Setup/Load Defaults
|
Tipy na nastavení parametrů stabilizace
Proporcionální zisk
- Vyšší zisk bude mít za následek vyšší stabilitu. Příliš velký zisk má za následek rychlé kmitání modelu v dané ose.
- Nižší zisk může mít za následek menší stabilitu zejména venku ve větru.
Vyšší zisk oceníte, pokud se nacházíte ve vyšší nadmořské výšce nebo v teplejším prostředí. A naopak nižší zisk použijte v nižší nadmořské výšce nebo v chladnějším prostředí.
Integrační zisk
- Vyšší zisk bude mít za následek stálost modelu. Příliš velký zisk má za následek pomalé kmitání modelu v dané ose.
- Nižší zisku bude mít za následek pomalé unášení / driftování modelu.
Vyšší zisk oceníte, pokud se nacházíte ve vyšší nadmořské výšce nebo v teplejším prostředí. A naopak nižší zisk použijte v nižší nadmořské výšce nebo v chladnějším prostředí.
Derivační zisk
- Vyšší zisk zlepší rychlost odezvy na pokyny vysílače. Příliš velký zisk má za následek velmi rychlé kmitání modelu v dané ose.
- Nižší zisk zpomalí odezvy na pokyny vysílače.
Článek je zařazen do následujicích kategorií:
Článek byl vytvořen 27.6.2019. Poslední úprava proběhla 27.6.2019.
- Více než 80 000 položek skladem
- Expedice ihned při objednávce do 14:00
- Osobní odběr na prodejně zdarma
- Oficiální distributor
- Poradenství a servis
Na vašem soukromí nám záleží
Používáme soubory cookies k zajištění funkčnosti webu a s Vaším souhlasem i mj. k personalizaci obsahu našich webových stránek. Kliknutím na tlačítko „Rozumím“ souhlasíte s využívaním cookies a předáním údajů o chování na webu pro zobrazení cílené reklamy na sociálních sítích a reklamních sítích na dalších webech.